余り部品があったので双眼望遠鏡を作りました。

対物レンズはビクセンのSpotting80Sっていう望遠鏡に使われていたものです。
カビや汚れがあったのですが、洗浄したら使えそうでした。
鏡筒やフォーカス部分は他のレンズと組み合わせてしまったので対物レンズだけが残っていました。

これはSVBONYのおもちゃ望遠鏡に使われていたものです。
以前になんちゃって双眼望遠鏡を作ろうとしておもちゃ望遠鏡を用意したんですが、ドローチューブが細すぎたので使わずに放置されたいたものです。

鏡筒パイプとフードは3Dプリンタで作成しました。
鏡筒パイプはビクセン規格のアリガタも付いた状態で作ってみました。
鏡筒パイプにはビクセンの90mm鏡筒と同じネジ切りを付けて対物レンズホルダーを接続します。
フォーカス部分の接続はネジ止めになっています。
Spotting80Sのフードが伸縮可能で対物レンズホルダーがその様な構造だったので、それに合わせてフードを作成し伸縮可能にしました。

組み上げたらこんな感じです。
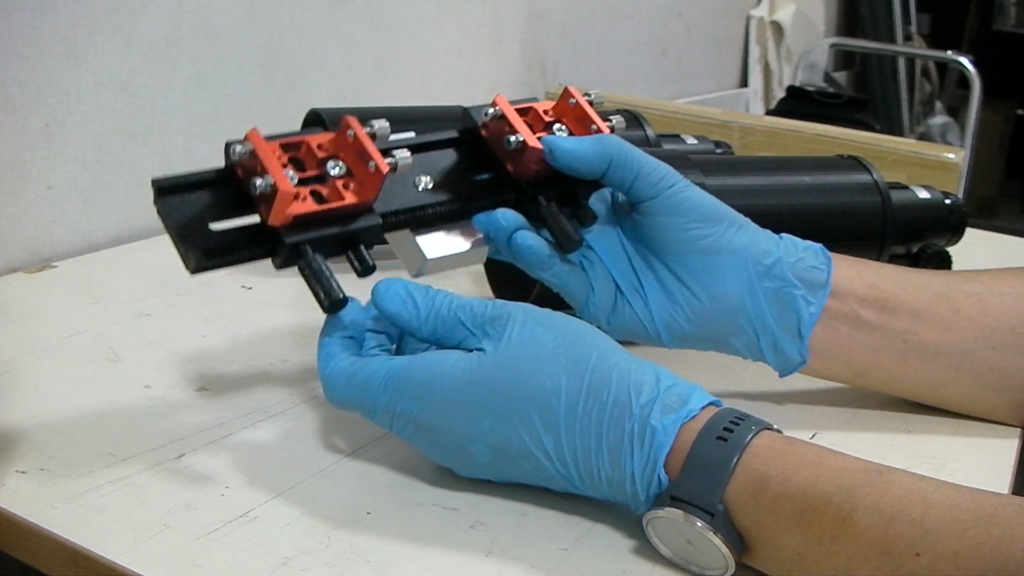
双眼用の台座はカメラスライダーを使って作りました。
カメラスライダー2台分の台座を1つのスライダーに搭載し、そこにアリミゾ台座を載せています。
これで双眼望遠鏡として目幅調整が出来る台座になっています。
このアリミゾ台座は受け側にネジを追加して水平方向の微調整が出来る様にしてあります。
レールにはアリガタプレートを付けたので、いろんな架台に載せられます。
アリガタプレートは1/4カメラネジで付けてあるので、アリガタプレートは外してカメラ用三脚にも載せられます。
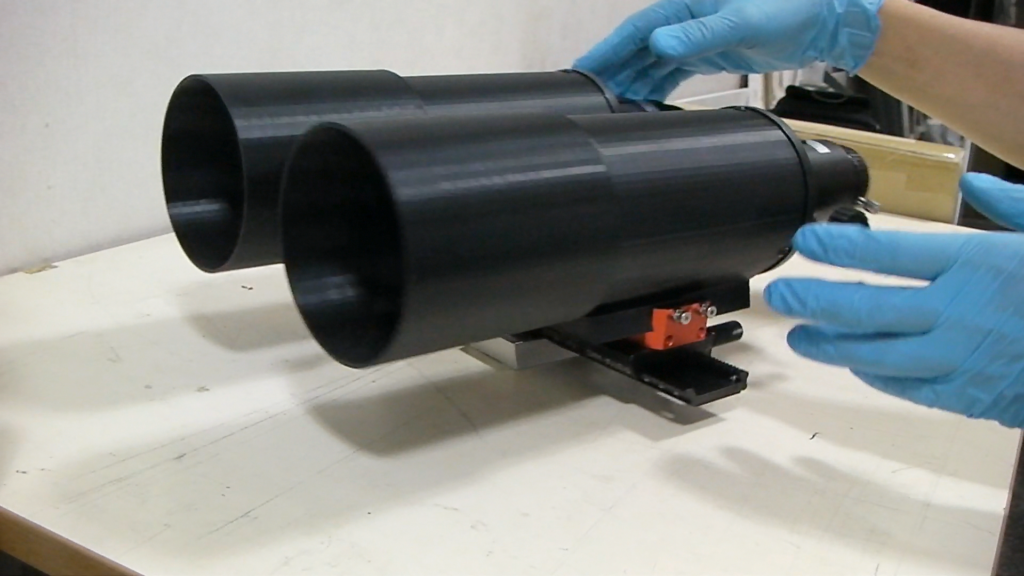
望遠鏡を台座に載せるとこんな感じ
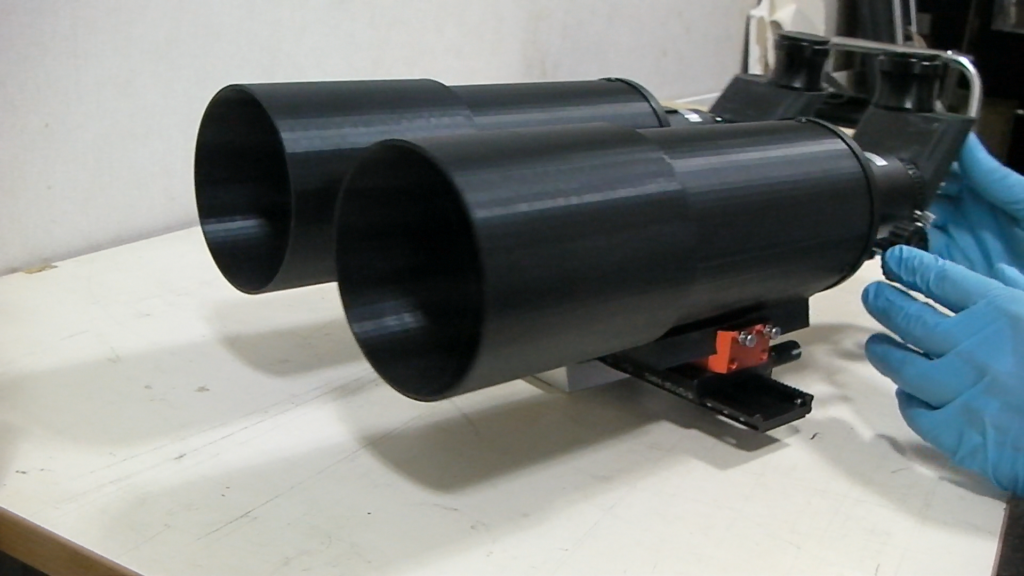
以前に紹介した正立天頂ミラーの双眼対応版を作って取り付けました。
双眼対応版な部分は鏡をネジで止める様にして、少しだけですが光軸調整が出来る様にしてあります。
この後、光軸調整を行い完成しました。
腰痛で山での作業が出来なかったのでこんなんを作ってました。
双眼望遠鏡絡みでは他にも自作で治具作りをしてたりしますのでおいおい紹介させてもらいます。